Hur styr man en gyrokopter?
Det finns tre kontroller, pedaler för roder, spaken för att vinkla rotorn och gasreglage.
Pitch (loopingplanet) styr man med en joystick som är kopplad till rotorn. Drar man spaken bakåt vinklar man (tiltar) rotorn bakåt vilket momentärt ökar lyftet och minskar farten genom luften. För man spaken framåt minskar lyftkraften och farten ökar. OBS! Det är farligt att föra fram spaken alltför hastigt i en gyrokopter.
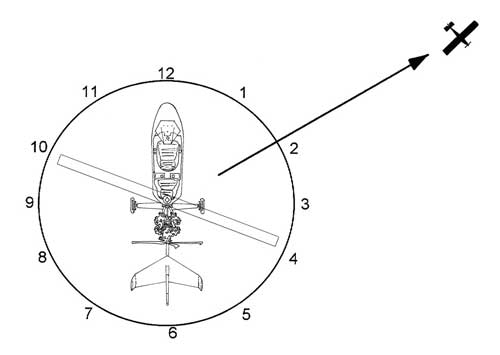
A simple set of rudder pedals move the rudder on the vertical stabilizer, just as on a fixed wing aircraft. The stabilizer is mounted behind the pusher propeller to maximize stability, and the rudder pedals also control the front landing gear, making it possible to steer the gyro on the ground.
Gasreglaget är monterat bredvid piloten för att det skall vara lätt att nå.
Start
Vid start måste rotorn varvas upp tillräckligt för att skapa tillräckligt med lyftkraft. Det gör man genom att låta luften passera genom rotorbladen. För att påskynda detta använder man en sk pre-rotator som tar kraft ifrån motorn för att varva upp rotorn vid start. När väl rotorn har ett tillräckligt varvtal kopplar man ut pre-rotatorn och rotorn får rotera fritt. Sedan vinklar (tiltar) man rotorn bakåt och accelererar maskinen på marken för att öka luftströmmen genom rotorn. Till slut flyger man maskinen i autorotation.
Det är också möjigt att starta en gyrokopter utan pre-rotator men detta kräver en väldigt lång landningsbana.
I USA finns det maskiner som kan genonföra en sk ’jump start’ genom att använda en rotor som kan pitchas. Rotorn accelereras till ett högt varvtal med en låg pitch och sedan vinlas rotorn till normalläge. Maskinen ”hoppar” då upp ett par meter och sedan fortsätter man genom att flyga framåt i autorotation.
Landning
När man drar av gasen sänks hastigheten framåt och gyrokoptern övergår till en sjunkande läge. Autorotationen fungerar fortfarande eftersom luften strömmar genom rotorn underifrån och rotorn behåller därigenom sitt varvtal. Lyftkraften är dock inte tillräcklig för att bibehålla höjden när man stängt av motorn och gyrokoptern sjunker till man kan genomföra en trygg landning.
På grund av det här har gyrokoptern en fördel framför helikoptern. Helikoptern har en pitch på rotorn om ca 11 grader vilket gör att bladen snabbt stannar om inte piloten snabbt pitchar om bladen till en lägre pitch så att bladen börjar autorotera. Oavsett hur snabb piloten är så förlorar man viktig tid på denna manöver.
Faror med gyrokopter
Gyrokoptrar kan vara farliga om man försöker flyga dem som om de var flygplan.
Av två anledningar, luftströmmen får aldrig passera rotorn från fel håll. (negativ G):
1. En flygande gyrokopter hänger i rotorn som om den vore upphängd i ett snöre. Så länge gyrokoptern hänger från rotorn är maskinen stabil. Om luft skulle passera rotorn från fel håll skulle det vara som att försöka balansera gyrokoptern ppå ett snöre uppåt och inte neråt. Detta är vad som kallas negativ G, vilket bara är en annan benämning för upp och ner…
2. Direkt när luft passerar rotorn från fel håll, dvs upp och ner, bromsar rotorn upp och trycks nedåd av den omvända luftströmmen.
Det som kan orsaka detta är:
Pilot-Induced Oscillation, eller PIO
PIO inträffar när en pilot ändrar gyrokopterns pitch (loopingplanet) för snabbt och sedan korrigerar sig själv genom att göra en omvänd rörelse för att återställa sitt misstag. Den omvända rörelsen är ofta överkompenserad och gyrokoptern börjar gunga men nos upp och nos ner. Ungefär samma effekt kan man se när en oerfaren förare försöker arbeta med koppling och gas. Ofta inträffar detta under högt gaspådrag. Om piloten sedan fortsätter att ”slåss” mot dessa krafter kan detta leda till att rotorn (som är flexibel) kan sakta in pga av en minskande positiv G belastning och i värsta fall slå ned på propellern eller stabilisatorn vilket leder till ett okontrollerat fall. För att undvika PIO så tar man försiktigt spaken aningen bakåt och drar sedan av gasen. Detta är den exakta motsatsen av vad flygplanspiloter har blivit lärda och det har lett till olyckor som tidigare gett gyrokoptern ett oförtjänt rykte av att vara ”farlig”.
Två faktorer kan leda till pitch instabilitet: Ingen eller för liten stabilisator på en för liten bom och för hög tyngdpunkt på propellerns kraft. En stor stabilisator och gärna med en propeller som blåser på den minskar risken för att gyrokoptern skulla hamna i en sk. ”Bunt” pga av pilotfel.
Power Push-Over (PPO)
En gyrokopters stig eller sjunkhastighet är direkt kopplad till dess gas på- eller avdrag. Mer gas ger högre stig. För att behålla höjden vid ett högt gaspådrag måste piloten vinkla (tilta) rotorn framåt. Rotorn blir då nästan horosontal och joysticken blir mer känslig. För mycket framåt med joysticken kan vinkla rotorn nedåt. Om detta händer passerar luften genom rotorn ifrån fel håll och rotorvarvet bromsas upp för att skapa lyftkraft. En gyrokopter med för högt propellertryck (thrust line) pitchas då framåt ifrån propellerns tryck och tumlar sedan över likt en kullerbytta i luften. Det är omöjligt att återfå kontrollen efter en PPO.
Om propellerns tryck är nedanför tyngpunkten på gyrokoptern (low thrust line) tenderar gyrokoptern att pitcha nos upp, vilket är ofarligt. Det är svårt att bygga en gyrokopter med lågt propellertryck utan att ha en alltför hög mast men de flesta gyrokoptrar är byggda med så lågt propellertryck som möjligt.
Vi säljer ELA gyrokopter som har tagit hänsyn till dessa faror och byggt en maskin designad för att undvika dessa.
Med ordentlig gyrokopterutbildning och en bra maskin kan dessa faror undvikas. MEN dessa två faror är anledningen till att såväl nybörjade som erfarna piloter måste utbilda sig innan de flyger en gyrokopter!